Progress
1. 📊 Gantt
Evaluation Error: SyntaxError: Invalid or unexpected token
at DataviewInlineApi.eval (plugin:dataview:19027:21)
at evalInContext (plugin:dataview:19028:7)
at asyncEvalInContext (plugin:dataview:19038:32)
at DataviewJSRenderer.render (plugin:dataview:19064:19)
at DataviewJSRenderer.onload (plugin:dataview:18606:14)
at DataviewJSRenderer.load (app://obsidian.md/app.js:1:700520)
at DataviewApi.executeJs (plugin:dataview:19607:18)
at DataviewCompiler.eval (plugin:digitalgarden:12508:23)
at Generator.next (<anonymous>)
at eval (plugin:digitalgarden:91:61)mermaid\n" + ganttCode + "\n```");
- Todo
- [ ] coding for all graphs
- 코딩 진행사항
- 현재 main branch 구조
- EAGstatic_Project_Structure
- github readme로 대체할 수 있지 않나?
- 현재 개발중인 feature 의 branch작업
- EAGstatic_Sync_Analysis
---
## Lab meetings
- 20260306 lab meeting
- 2차 완료하였던 사람 1명 탈락됨. 11명 재측정 완료
- 데이터 수집 현황
- kinvent 수집오류 등으로 인해 오류를 재측정한 경우 있음.
- 체중 부하 : 20구간 말고 50, 80, 100 구간에서 균형전략/보상전략을 사용하는 경우에 노이즈가 들어온다. / 80, 100으로 체중이 들어올 때, knee internal rotation 이 이루어지는 경우가 있었다.
- 체중 이동 속도
- 균형 유지
- 균형 전략
- 전신 및 다리 근육 긴장
- 20260212 lab meeting
- 이청기 연구비 준비
□ 발목의 inversion과 eversion 각도가 무릎 연골에 미치는 영향
1. 경사판 제작 : 5도, 10도, 15도
2. 경사판을 측정 측(Rt.) 발 아래에 둔다(ackle의 inversion, eversion 각각
적용)
3. 정적 data
- 양발서기
- EAG 측정
- 체중지지 50%
- 0도 / 5도 in, 5도 e / 10도 in, 10도 e / 15도 in, 15도 e
4. 동적 data
- 양발서기
- EAG 측정
- 0% > 50% > 0% > 100% 체중 이동
- 0도 / 5도 in, 5도 e / 10도 in, 10도 e / 15도 in, 15도 e
※ 정적 data와 경사면에서의 보행 관련 선행 연구와 연결하거나 별도 해석
lmm prompt : 현재 진행하고 있는 프로젝트를 기반으로 위의 새로운 실험을 진행하는 연구계획서를 작성하여 funding 신청을 하려고 해.
해당 형식은 첨부한 pdf 파일과 같음
- 20260128 lab meeting
- 연구 행정 관련
- kinvent 구독료 : csv 다운받기 위해서는 169000*2
- IRB 교통 동의서 작성
- 기자재 준비 : openbci 여분 준비. 예비랩탑
- 데이터 수집관련
- 채널에 따른 오류 진행 : joint line 2,3,6,7 위주 신호 잘나오면 수집
- 실습생 15명 참여 - 2차 실험까지 시행할 수 있도록 하고 있음.
- 경성대 학생 30명 이상 지원해서 성별에 맞게 수집하고 예비인원확보
- 동아대 관리과 연계 - 2주정도 교내에 포스터 게재해주겠다 함
- 비용없이 포스터 부착가능
- 2월에는 5시부터도 수집추가 예정
- 선결제로 소진 - 본도시락 50 , 중국집 26
- 20260121 lab meeting
- 앞뒤로 할때는 100체중을 했을때 노이즈가 발생하는 경우가 많았다.
- 0으로 갔다가 50, 80, 100으로 가는 D 방법으로
- 전후는 A방법, 측정측에 두는 것은 전후,
- 목발간의 차이는 크지 않아서 목발은 한종류(forearm) -> 이번주
- 2분정도 휴식시간 - 근육에서는, EAG에서는 휴식시간
- 1회를 최대한 많이 2월안에 모으기
- 재활치료팀장님에게 이야기하여 실습생들에게 자료모으도록
- 2/13 되면 14명까지 데이터 수집이 된다.
- 글로컬 임상실증센터
- FDA2 받을 때, PTSD, ADHD 환자들 대상 기기만든 것 있다.
- 3/4월에 나오는 것 2월에 업체
- 보유장비 - exoday, fitbit, forceplate, openbci, xsens-dot
- 출장비 말고 다른방법 -> 인건비 2월에 올려서 시행
- 20260120 lab meeting
- 근전도 노이즈는 다리를 들고 있어야 해서 근전도 노이즈가 들어가는 것은 아닐지, 눌렀을 때도 힘이 많이 들어가는 것 아닌지 확인
- 심사를 겨울에 11월 초에 심사를 받았다. 심사는 온라인으로 하셨다. 6월초에 심사, 심사는 20명은 모을 수 있는것으로.
- 2월까지 데이터 수집이 되면은 3-4월 2달 정도에 분석 완료하고
- Chapter 1 : 서론 - chapter 4가 들어가므로, 기존의 내용에서 수정하는것이 필요하다.
- Chapter 2 : 관련연구 - 배경, 관련연구
- Chapter 3 : 출판된 논문 = note : 박사학위 논문의 chapter 3의 노트에는 내용은 동일한 내용이 출판 된것이다. 공동연구자가 참여한 것이다.
- DL 을 생성형 ai 를 활용하여 해보라.
- 데이터 수집 및 체중 이동은 좌우 한가지만 해봐도 되겠다.
- 신뢰도 분석은 빼도 좋을 것 같다.
- 20260114 lab meeting
- 외부 대학교에서 시행.
- 대안 : 짧은 동영상 형태로 교육자료 배포 예정
- 4가지 task 에서 결과 확인 해보도록합시다.
- 레버암 작게 해서 세팅 /
- 리트렉션 끝범위에서 inf. 앵글 끝에서 통증과 soreness 가 생긴다. - protraction 연습많이 했다.
- scapulohumeral rythme 분석 - 통증생겨서 muscle guarding 생긴사람이 teres minor 등 humerus 와 depression exercise 이후 가동범위가 드라마틱하게 좋아지는 부분. rhythm. 몇몇분들은 clavicle inf. angle 분석
- 20260107 lab meeting
- channel 4번 혹은 8번에서 노이즈와 드리프트 많아 2,3,6,7에 대해서만, 측정간 3-5분 휴식
- 대상자가 춥다고 얘기했을때 노이즈 확인
- 20251231 lab meeting
- 기업체 임상 연구 : 심의료 납부되어야 답변서 확인 가능 - 시정승인 상태
- 연구방법 문서화 중 SOP ->
- 시험
- 레퍼런스와 그라운드 부착부 변경
- 20251203 lab meeting
- HDD 확인
- 연구계획서 - 오후 중에 공유 (15일 8시 까지)
- 20251126 lab meeting
- drift 보정하는 코드 사용했다.
- method
- 균형유지 손가락만 지지
- 20, 50, 80에서 범위는 +-5프로
- 20251119 lab meeting
- 체중이 완전히 실릴때 노이즈 있었다
- 2월까지 연장 신청서
- 3월 핵심연구 - 도전형
- y 축 그림그릴때 자동으로 최소 수치 단위 나오도록 하는 코드 수정
- 20251112 lab meeting
- 행정
- 융기원 완료
- 초등 교구 선정
- 파일럿 연구
- 하이브리드룸 장소에 문제가 있음 -> 장소를 잘 찾아서 시행할 수 있으면 좋겠다.
- 학교에 방문에서 시행
- 프로토콜 관련
- 체중 이동이 더 용이하다는 피드백이 toe tap,그리고 짝다리로 선다는 개념 이용
- 추 후 구매
- 윤진아 교수님이 물어보셨었다.
- 계약이 언제끝나는지였고, 두번째는 심장내과에 원내과제로 진행을 하시는데 사람을 구하지 않을까
- 12월 까지 한승헌 교수님 2월 계약 연장 이야기 하기
- 20251105 lab meeting
- 4, 8번 위치
- 컵 전극 사용시
- 지난 주 파이썬 및 랩탑에서 프로그램 충돌이 일어나는 경우가 있다?
- 기존 disc 형태 electrode와의 차이?
- 전극 이동시에는 cup electrode 가 편하다.
- 연구실 환경 끄고 시작한다.
- 0으로 돌아갔다가 각각의 체중부하로 가는 방식 (+-5) -> 시간되면 역으로 가는 것도
- 0-50-100 (확인)
- 기전적으로도 맞는 방법일 수 있겠다.
- 20251029 lab meeting
- cup electrode *2 / Paste * 3 도착 완료
- 랩탑 : 튕긴다.
- 데스크탑 : 신명준교수님께 확인
- 임상실증센터 기업체 연구 확인
- [ ] 지난 주 Task list
- [ ] 무릎은 편상태로
- [ ] 2011 ref
- [ ] 0-25-50-80-100-80-50-25-0
- [ ] 0-25-50-80-100-80-50-25-0 (toe touch)
- [ ] 0%에서 노이즈 최소화 하기 위해서 plantar all, toe tap 적용 -> balance 가 무너지면서 나오는 noise는 벽을 finger tap으로 하면 괜찮고, 손잡이를 잡으면 어려움
- [ ] 0-25-0-50-0-80-0-100
- [ ] 0-25-0-50-0-80-0-100 (toe touch)
- [ ] lee ref ? - 다음에 해보기
- [ ] side to side weight shift에서 내측과 외측 연골에 걸리는 부하가 다른지 확인
- [ ] 사전 논문 현재까진 없고, 이전 COG 논문 확인 필요
- 20251022 lab meeting
- 비체중부하에서 직접 체중부하 이동
- 2011 ref : 25, 50, 80 사이에서 차이가 보이지는 않는다.
- 2011 ref : 두번째 그래프에서 6,7,8 ch 에서 점차 커지는 신호는 확인 되었다.
- drift 제거
- Task list
- 무릎은 편상태로
- 2011 ref
- 0-25-50-80-100-80-50-25-0
- 0-25-50-80-100-80-50-25-0 (toe touch)
- 0-25-0-50-0-80-0-100
- 0-25-0-50-0-80-0-100 (toe touch)
- lee ref ? - 다음에 해보기
- side to side weight shift에서 내측과 외측 연골에 걸리는 부하가 다른지 확인
- 문제점
- drfit, 일관된 검사환경
- 해당전극으로 실험 한번더 필요
- 20251015 lab meeting
- 학회행정관련
- 전극 부착 : 해외 결제 10/17 예정
- 여비 숙박비 => 부족분은 전문가활용비로 보충
- joint line에서 시행함
- 0 -> 25 -> 50 -> 75 까지 가는 동안 계단식으로 나타나는 변화는 감지됨.
- 0 -> toe 나 heel touch 만 했다가 -> 25로 가는 방법 어떨지?
- isometic contraction에서 변화가 있는 것 같은데, 규칙적으로 관찰되는 것이 있는지.
- 미리 수축했을때 연골변위(EAG발생)이 미리 발생하는 경향도 있다!
- bracing이 된다는 이야기를 해줄 수 있을지?
- medial - lateral 로 COG가 다를때 마다 EAG 가 잘나오는 구간도 차이가 있었다.
- 염두에 두고 다음에 해보는 것으로
- forward leaning 시켜서 앞쪽으로 잘나오게 하는 방법
- 체중 이동 방향을 변경하면서 각 부분을 검사하는 것
- 2025-10-01
- 0 / 100 weight shift
- ch 6, 7 : joint line과 그 위쪽
- 압박시간과 노이즈?
- 2025-09-10
- [ ] 동일 부위 부착 후 측정 회차 별 데이터 상이한 부분 : 바로바로 이동해서 그래프를 보는 프로토콜을 문서화, 및 시각화
- [ ] 킨벤트 간혹 데이터 저장이 되지 않는 문제 업체 확인
- [ ] 수동 저장은 필요, offset 동기화 장비 - 확인
- [ ] 킨벤트 최고 등급인 Excellence 구독 시에만 CSV 출력 가능 비용은 \169,000원/월 -> 연구비 카드 결제로 바꾸기
- [ ] 결제 연구비 카드 변경
- [ ] 측정 방법 50%에서 시작?
- [ ] 연구대상연력, 교통비 조정 -> 60명으로 바꾸기. xray 무릎, 공인주 연구원이 irb에서, 관찰연구 첫번째는 교통비, 두번째는 기프티콘으로 준 케이스 있다. 스타벅스 2.5천원 정도 주었었다.
- [ ] 노션 구독 (게스트전환), 데이터 git 등으로 이관 고려
- [ ] 충전시간 - 50케이스 이상 해도 유지 중
- 부경대
- 2025-03-08 % 0308 PRML lab meeting
- 후속연구 및 졸업논문 회의
---
# LLM 설계
## 1. 전체 연구설계(Study Design)
1. **연구 대상자 모집**
- 건강 성인 60명 -> 44명 (40명 & drop out 10%)
- 성별 층화 모집
- 대상자 특성(키, 체중, 나이, 성별)을 사전에 균질화
2. **동작별 시행 순서**
- 대상자 편의 등을 위하여 유지시간과 횟수(7초/5회→5초/3회) 조정
1. 보조기 적용 X ( side to side / front to rear)
1. 0→20→50→80→100→80→50→20→0(단위 : %, 반복적 체중지지, 총 45초 / 3회 측정)
2. 구간별 변화 값 상이할 것으로 예상
2. 보조기 적용 (axilla crutch / wrist crutch)
1. 건측과 환측 모두 측정
2. 0→20→50→80(총 20초 / 3회 측정)적용, 보조기 착용 시 반복하지 않음
3. 구간별 변화 값 상이할 것으로 예상
- 각 동작마다 7초씩 **유지**, 동작 전환을 1초로 설정, 이를 **5회 반복**
- **동작 순서를 무작위화**(randomization)하거나, 적어도 동작1→2→3… 식의 고정 순서가 근피로 등에 영향을 주지 않는지 고려
- 만약 7가지 동작 모두를 쉬는 시간 없이 연속으로 하면 피로 누적이 일어날 수 있으니, 동작 사이에 짧게 휴식(예: 30초~1분) 부여
3. **체중부하(Weight-Bearing) 확인**
- 20%, 50%, 80% PWB 시 **실제 체중계** 등으로 대상자가 감각을 맞출 수 있도록 사전 안내
- 실험 중에도 발 밑(또는 측면)에 간이 체중계(또는 압력센서)를 두어 실시간 확인하거나, 최소한 랜덤 체크를 통해 잘 유지되고 있는지 모니터링 가능
4. **EMG 측정 세팅**
- 측정 근육 선정: 예) 하지 근육(대퇴사두근, 햄스트링, 종아리 근육), 둔부 근육(둔근), 필요 시 상지 보행보조 시 견관절 주변 근육(삼각근, 상완이두근 등) 포함
- 표면 근전도(sEMG) 전극 부착 위치 표준화, 피부 준비(제모·소독), 전극 간 거리를 동일하게
- EMG 샘플링 레이트(예: 1kHz 이상), 필터 설정(대역통과 필터 20~450 Hz 등), 노이즈 제거 절차 확인
5. **동작별 측정 구간**
- 각 동작을 7초간 유지한다고 할 때, **분석 구간**은 보통 **가장 안정된 중간 3~5초**를 선택
- 동작 전환 과정(1초)이나 처음/마지막 1초는 자세가 흔들리거나 자리를 잡는 구간일 수 있으므로 제외
- 5회 반복한 후, **평균값** 또는 **최고값(RMS peak 등)**을 산출
---
## 2. 통계분석(Statistical Analysis) 개요
### 2.1 주요 변수(Outcome Measures)
1. **EMG 크기 지표**
- 예: RMS (Root Mean Square), 평균 근활성도(Mean amplitude), 혹은 통합 EMG(IEMG)
- 필요하다면 **정규화(normalization)**: 최대 수의적 등척성 수축(MVC) 대비 %EMG로 환산
2. **각 동작 시 체중부하 정확도**
- 실제 측정된 체중계 값(예: 얼마나 20%에 근접했나)을 % 오차 등으로 계산할 수도 있음
3. **동작/자세 안정성 지표**
- 만약 동작 시 신체 흔들림(CoP 변위 등)을 측정한다면, 그 데이터를 함께 사용
### 2.2 분석 설계
#### A. 7가지 동작을 “단일 요인(조건)”으로 간주하는 방법
- **반복측정 일원분산분석(Repeated-measures ANOVA)**
- 요인(factor): 동작(7수준)
- 종속변수: 각 근육의 EMG (RMS 등)
- 사후분석(Post-hoc): Bonferroni, Tukey 등으로 동작 간 pairwise 비교
- 전제 충족(정규성, 구형성 등) 확인 후 필요시 그린하우스-가이저(Greenhouse-Geisser) 보정
이 경우 ‘PWB 20% vs 50% vs 80%’, ‘크러치 유무’, ‘Weight shift’ 등을 하나의 범주로 묶어 7레벨(동작1~7)로 분석.
- **장점**: 간단하게 하나의 ANOVA로 처리 가능
- **단점**: 어떤 요인이 EMG에 영향을 많이 미쳤는지(예: PWB 수준 vs 크러치 vs 단발서기)는 구체적으로 해석하기가 다소 모호
#### B. 2요인 반복측정(factorial) + 1가지 별도 동작으로 구분하는 방법
1. **메인 요인**
- PWB 수준(3단계: 20%, 50%, 80%)
- 보조기구 유무(2단계: 없음 vs forearm crutch)
- 따라서 **3x2 = 6수준**
2. **별도 동작(Weight shift)**
- 아예 다른 메커니즘(한발서기→두발서기→반대쪽 한발서기)이므로, 상기 6수준과 분석을 같이 묶으면 해석이 복잡
- 별도로 한 번 더 **반복측정 ANOVA**(또는 평균 ± 표준편차 비교)로 “좌/우/양발 지지 시 EMG 차이”를 볼 수도 있음
- **2요인 반복측정 ANOVA**로 6가지 조건(3x2)에 대한 근전도 비교 → 사후분석 시 “PWB 수준 차이”와 “크러치 유무 차이” 파악
- **동작7(Weight shift)**는 **다른 동작**으로 separate ANOVA를 진행하거나, 한발서기(A), 두발서기(B) 각 7초씩 측정된 EMG의 차이(예: A vs B vs 다시 A’)도 **반복측정 ANOVA**로 확인 가능
이 구조가 **연구 가설**(예: “PWB 수준과 보조기 사용이 근전도에 유의미한 상호작용을 보이는가?”)을 명확히 테스트하기엔 더 체계적입니다.
#### C. 정규성 충족이 어려운 경우
- 표본 크기가 작거나, EMG 데이터 분포가 심하게 비정규분포라면
- **Friedman test**(비모수적 반복측정 대체) 또는 **선형혼합모형(Linear Mixed Model)**으로 분석
- Post-hoc 비교 시 Wilcoxon 부호순위 검정 등을 사용하되, 다중비교 보정(Bonferroni 등) 필수
---
## 3. 반복 측정 횟수와 데이터 처리 요령
1. **각 동작 5회 반복 → 평균값**
- 예: 5번 중 중간 3회 평균을 사용하거나, 5회 평균 사용
- 신뢰도가 높다면 5회 모두의 RMS를 구해서 평균 ± 표준편차를 구하고, **개인별 ‘대표값’을 한 값**으로 만들어 통계에 넣음
- 만약 5회 반복 간 변동성이 궁금하면, **ICC(시험-재시험 신뢰도)**를 산출할 수도 있음
2. **근전도 신호의 안정구간 설정**
- 7초 중 초반/후반 1초는 제외하고, **중간 5초 데이터**로 EMG RMS, IEMG 등을 추출
- 전환(Transition) 1초는 별도 분석 제외
---
## 4. 결과 보고 시 핵심 포인트
1. **단순 비교**:
- “20%, 50%, 80% PWB에서 특정 근육의 EMG가 어떻게 달랐는지”
- “크러치 사용 vs 미사용 시 EMG 차이”
- “Weight shift 중 한발/두발 지지 시 근활성도 차이”
2. **통계 유의성**:
- 반복측정 ANOVA 결과(주효과 main effect, 상호작용 effect)
- Post-hoc 검정 시 p값, 효과크기(effect size, 예: partial eta²)
3. **신뢰구간**:
- 평균 ± 표준편차, 혹은 평균 ± 95% CI
4. **그래프 작성**:
- 조건별 막대그래프(에러바 포함)
- PWB 수준 변화나 동작 간 근전도 변화를 한눈에 확인 가능하도록 시각화
---
## 5. 정리
1. **연구설계**:
- 각 피험자가 7가지 동작(조건)을 모두 수행하는 **반복측정(Within-subject) 디자인**
- 각 동작은 7초 유지, 동작 간 1초 전환, 5회 반복 → EMG 측정
2. **통계분석**:
- **(간단히) 일원 반복측정 ANOVA**: 동작(7수준)을 한꺼번에 비교
- **(정교하게) 2요인 반복측정 ANOVA**(PWB 수준 x 크러치), + 별도의 Weight shift 분석
- 정규성 어려우면 **Friedman test** 등 비모수 기법 적용
3. **반복 시도 처리**:
- 5회 중 안정 구간 EMG를 RMS 등으로 뽑아 평균
- 필요하다면 시험-재시험 신뢰도(ICC) 함께 보고
4. **결과 해석**:
- “PWB 수준별, 보조기구 사용별, 혹은 한발서기/양발서기 시 근육활성도 차이가 유의미한지”
- 실제로는 근활성도, 관절 각도, 체중지지 편차 등 여러 지표를 종합적으로 해석
이러한 구조로 진행하면, **체중부하 수준·보조기 사용이 근전도에 미치는 영향** 및 **한발서기와 양발서기의 근활성도 차이**를 일관되게 설명
또한 **동작 간 피로도 누적**, **자세 잡는 숙련도 차이**를 최소화하기 위해 **충분한 휴식**, **무작위 순서**(동작 수행 순서 랜덤화) 등을 고려하는 것이 바람직
---
# Stage 0. Env, Data Source
- Env
- VScode(Claude), Jupyter lab, R
- Data source
- file path : Z:\drive\0_project\EAGstatic_crutch
- Coding file : drawplot2.ipynb, stat.ipynb, EAGstat.R
- Shared data : AWS(ID: sense0906@gmail.com / PW: )
- equipments
- [겨드랑이 목발](https://smartstore.naver.com/medihs/products/9216778646)
- [손목 목발](https://smartstore.naver.com/sodak/products/10285837541?n_media=643599&n_rank=5&n_ad_group=grp-a001-02-000000046084739&n_ad=nad-a001-02-000000329856990&n_campaign_type=2&n_mall_id=ncp_1ol90t_01&n_mall_pid=10285837541&n_ad_group_type=2&n_match=3&NaPm=ct%3Dm8xtqb60%7Cci%3D0Ay0001jeIHBTAWL%2Df1L%7Ctr%3Dplas%7Chk%3D1e8d923f68294238556662bbfee97b32407c7bbf%7Cnacn%3DQOI3BcAeFZf4A)
- [ForcePlate](https://smartstore.naver.com/snsi/products/8246319568?NaPm=ct%3Dm8y2uew8%7Cci%3Dc812b14443bf4d60095b00728f9a55df0890d1b3%7Ctr%3Dslsl%7Csn%3D460819%7Chk%3Da937cbcb31d86f7897e2c8dcf210e36bd84abeb9&nl-au=5325aff18265438fb1b0234b79d8cb63&nl-query=k+force+plate)
- Kinvents setting
- 프로토콜
- 다이나믹리포트1 - 좌우 방향 체중 이동
- 준비 5초
- 1세트
- 지속시간 50초
- 두발서기 7
- 한발서기 7
- 두발서기 7
- 반댓발 한발서기 7
- 다음동작 전환 - 자동(7초 카운트 다운)
- 다이나믹리포트2 - 전후 방향 체중 이동
- 준비 5초
- 1세트
- 지속시간 50초
- 두발서기 7
- 한발서기 7
- 두발서기 7
- 뒷발 한발서기 7
- 다음동작 전환 - 수동
- 다이나믹리포트3 - 겨드랑이 목발을 이용한 부분 체중 부하
- 준비 5초
- 3세트
- 세트간 휴식 10초
- 지속시간 40(35)초
- 반댓발 한발서기 7
- 한발(20%) + 반대측 상지 목발 (80%) 7
- 한발(50%) + 반대측 상지 목발 (50%) 7
- 한발(80%) + 반대측 상지 목발 (20%) 7
- 한발서기(100%) 7
- 다음동작 전환 - 수동
- 다이나믹리포트4 - 손목 목발을 이용한 부분 체중 부하
- 준비 5초
- 3세트
- 세트간 휴식 10초
- 지속시간 40(35)초
- 반댓발 한발서기 7
- 한발(20%) + 반대측 상지 목발 (80%) 7
- 한발(50%) + 반대측 상지 목발 (50%) 7
- 한발(80%) + 반대측 상지 목발 (20%) 7
- 한발서기(100%) 7
- 중지
# Stage 1 Define variables & statistics
## stage 1.1. Descriptive definitions
1.1.1. Definitions of background knowledge
- Joint movement : distal or/and proximal part of joint were moved and relative position is change. active and passive are possible and usually joint has its own movement axis according to its anatomy
- Joint load : loading applied on cartilage contact surface within joint, mainly by gravity or muscle contraction
- PA(Physical activity) : joint movement + joint load, usually has the purpose to strengthen the muscle
- Q-setting : chair sitting(90 degree flexion), knee extension to end range(0 degree) and holding with maximal effort and return to initial position
- Squat : bipedal stance(0 degree) with shoulder width, squat till 90 degree knee flexion and stand-up
- Passive knee extension : side lying 90 degree flexion, passive knee extension to end range(0 degree) by examiner without any muscle contraction and return to initial position
- Surface EAG : detect cartilage generated potentials on skin surface which pre-determined electrode position
1.1.2. Definitions of EAG parameters
- IEP(initial electric potential): baseline EAG potentials before movement or PA
- EEP(end electric potential): final EAG potentials after movement or PA
- MIP: amount of joint movement-induced potential changes between IEP and EEP
- MIP amplitude = EEP - IEP (by only passive movement)
- PIP: amount of PA-induced potential changes between IEP and EEP
- PIP amplitude = EEP - IEP (by PA)
- LIP: amount of generated potentials from only cartilage load
- LIP amplitude = PIP - MIP (by only joint load)
- Potentials from other than cartilage
- Drift
- Confounding factors affecting surface EAG : mostly unspecified to date.
## stage 1.2. Quantification
1.2.1. Qualitative analysis of the EAG potential
- 개요 : PIP는 관절이 움직이는 동안 발생하는 비교적 큰 크기의(때때로 매우 큼) 하강 혹은 상승, 이어서 움직임 직후 변화된 각도가 유지되는 동안안 점진적으로 천천히 하강(기울기 감소)하여 flat 해 지는 변화로 다시 나뉨. (예시1: subject 4 (김병준) - channel 5)
- 즉 PIP 의 2가지 component가 있고, 이를 아래 두 가지로 decomposition 할 수 있다.
1. PIP_D(potential during PA)
2. PIP_A(potential after PA)
1. PIP_D : baseline shifting, randomly
- ==그 동안 의문이었던 signal reversal의 원인. 어느 방향으로 움직일지 예측불가==
- 무릎이 원래 자세로 돌아가는 과정 (returning to baseline position)에서 potential도 원래로 돌아가나 예외도있음.
1. PIP_A와 반대방향(전위 상승)으로 발생
- amplitude of PIP_D > PIP_A : PIP is negative value
- amplitude of PIP_D < PIP_A : PIP is positive value (or amplitude is very small)
2. PIP_A와 같은 방향(전위 하강, 가장 높은 빈도로 관찰)으로 발생
- PIP amplitude is always negative value (sometimes very large)
- 같은 방향으로 발생하면, 기울기가 달라지는 변곡점을 찾아야 함.
- 변곡점을 찾기 어려운 경우가 있음
- 변곡점이 명확한 채널을 기준으로 PA 가 멈춘 지점을 다른 채널에 적용할 수 있음.
2. PIP_A: gradual flattening, consistently
- 점진적으로 기울기가 줄어들어 flat 해지는(혹은 drift를 반영하는) potential graph를 보여줌
- 무릎이 원래 자세로 돌아가는 과정 (returning to baseline position)에서 potential도 대칭적인 모습으로 발생
- 예시 : decrease with gradual flattening VS increase with gradual flattening
3. PIP_D vs PIP_A between PA
- PIP_D는 3가지 PA(Q-setting / Squat / Passive knee extension)간의 모양 및 크기 variability 가 PIP_A에 비해 훨씬 크다.
- PIP_A는 Q-setting과 Passive knee extension 간에 모양이 비교적 잘 유지된다. 크기는 비슷하지만 Qsetting이 더 큰 경향
1.2.2. decomposition & labeling
- 예전 분석방법 : phase decomposition by second
- **큰 오차로 인해 5개의 point를 manual labeling 하는 현재 방법으로 변경.**
- 현재 분석방법 : Graph decomposition into phases by manual labeling
- 5 points between 6 phases
- P1 : initial point of PA, IEP
- P2 : end point of PA, EEP
- P3 : initial point of return PA
- P4 : end point of return PA
- P5 : initial point of flat potential
- 6 phases decomposed by 5 point
- Pre-phase : before PA : flat potential
- phase 1 : During PA : PIP_D
- phase 2 : During 6sec after PA : PIP_A
- phase 3 : During return PA : return PIP_D
- phase 4 : During 6sec after return PA : return PIP_A
- End-phase : from initial point of flatten potential to end
# Stage 2. 가설 & 실험설계
## Stage 2.1. Hypothesis to investigate
- 무릎의 움직임동안 유의한 surface EAG potential의 차이를 관찰할 수 있다.
- H1: 각 PA에서 knee angle에 따른 전위차가 있다.
- 각 knee angle에서 체위에 따른 전위차가 있다.(애매한 부분)
- 아래 두번째, 각 PA간의 전위차 비교 통계로 대체
- but pre-phase의 potential이 다르다면 0으로 보정해줄 필요는 있겠다.
- H2: 각 체위별 knee angle에서 전극위치에 따른 전위차가 있다.
- H3: LIP detection according to electrode position
- 능동운동으로 유발된 전위와 수동운동시 유발된 전위의 유의한 차이가 있다.
- 능동운동 간의 전위 차이가 있다.
- PIP_D
- PIP_A
- PIP_D + PIP_A
- H4 : 전극 위치에 따른 전위 차이가 있다.
## Stage 2.2 Experiments & statistical analysis
- Subjects enroll
- 20 subjects with 8 channel
- perform 3 repetition of each 3 PA
- Statistical analysis
- H1 : each PA
- PIP ; mean potential of pre-phase vs end potential of phase 2
- PIP_D ; mean potential of pre-phase vs P2 potential
- PIP_A ; P2 potential vs P4 potential - 중요
- subgoup analysis for channel in each PA (차이를 보이는 채널에서만 H2 으로 진행? 혹은 전부 H2을 시행하지만 고찰에서 강조..?)
- H2 : delta value of above parameters between PAs (q vs p, q vs s)
- delta value subgroup comparison according to channel. (PA간 유의한 채널이 다르다면..H1 subgroup analysis에서도 차이를 잘 보이면서 여기서도 차이를 잘보이는 채널을 추천하겠다. 혹은 두가지를 같이 보여주는 하나의 통계를 돌리고 고찰에서 두 가지를 설명하는 것..?)
- H3 : potential amplitue of PA vs returning PA
- eccentric or upward movements가 concentric or downward movement 와비교하여, 즉 loading 과 unloading 사이에서 유발전위의 차이가 있는가
- for compensating subject variability
- PA를 할 때 대상자 간의 EAG amplitude의 크기는 큰 표준편차를 보임
- 이전 논문에서 static weight shift에서 20명의 대상자간 (관절면 측면위치에서) 비슷한 크기의 전위 관찰.
- 가설 1 : 전극 위치의 불일치 : 신뢰도가 높은 전극 위치만 을 사용(사전연구에서는 내측 관절면) or 표면해부학 사용 및 숙련도
- 가설 2 : Weight shift 보다 90도-0도 움직임이 개인별 해부학적 차이가 큼 (patellar tracking 차이가 있는 등..)
- Proportional value 로 대체 혹은 다른 방법 사용
- 대상자간 인구학적요소 차이(키, 몸무게, BMI, knee circumference, knee arrangement)의 보정: multivariable analysis or ANCOVA
- potential comparison: ==paired-T==
- if compare 3 group : use RM ANOVA
- 필요한 부분
- test-retest reliability of EAG
---
# Stage 3. Documentation
## 3.1. Target journal
- JOR - reject at 2025.02.
- 이 후 후보들
1. BMC Musculoskeletal Disorders (Springer Nature) - IF: 2.2
- 분야: 근골격계 질환, 정형외과, 물리치료, 재활
- 특징: 파일럿 스터디 등 임상·연구 협업 예비 데이터도 게재 사례 있음
2. Journal of Experimental Orthopaedics (Springer) - IF: 2.0
- 분야: 정형외과 분야 전임상·임상 연구
- 특징: 혁신적 장치·측정기법, 예비 연구도 게재 사례가 있으며 임상 확장성 강조 필요
3. Acta of Bioengineering and Biomechanics (Polish Academy of Sciences) - IF: 0.8
- 분야: 생체역학, 생체재료, 재활공학 등 광범위
- 특징: 무릎 관절 역학 및 측정기법 연구, 소규모 예비연구도 비슷한 게재 사례가 있음. 정형외과-공학 융합 연구를 적극적으로 수용.
4. Muscles, Ligaments and Tendons Journal (MLTJ) - IF: 0.5
- 분야: 근육, 인대, 건(tendon) 관련 기초·임상 연구
- 특징: 정형외과, 스포츠의학, 재활의학을 모두 아우르며 무릎 관절과 주변 조직(연골 포함)에 대한 새로운 평가 방법이나 파일럿 연구도 수용 가능성이 큼.
5. Cartilage (SAGE) - IF: 2.7
- 분야: 연골(기초·임상·재생·생체역학 등) 특화
- 특징: 연골 관련 새로운 평가·진단 기법 연구에 유리, **소규모 샘플**에 대한 통계적 파워 지적이 있을 수 있으므로, 파일럿 연구임을 명확히 강조하고 향후 확장 가능성을 잘 서술해야 함.
### 정리
6. **Sensors**
7. **Gait & Posture**
8. **BMC Musculoskeletal Disorders**
9. **Medical & Biological Engineering & Computing**
10. **Cartilage**
11. **Journal of Experimental Orthopaedics**
위 순서는 최근년도의 **추정 Impact Factor**에 기반한 **대략적**인 높은 순에서 낮은 순 배열입니다. 투고 전, 각 저널의 최신 IF와 **Aim & Scope**, 투고 규정(Author Guidelines)을 꼭 확인하시고, 연구의 ‘파일럿 스터디’ 특성, 연구 혁신성(비침습 측정법), 임상 적용 가능성을 잘 강조하여 투고 전략을 세우면 도움이 될 것입니다.
## 3.2. Results & Discussion point(Important only, 추 후 해당 draft에 작성)
- 결측 채널
| | stretch |p-stretch |
|---|---|---|
|subject1|||
|subject2|||
|subject3||N|
|subject4|||
|subject5|||
|subject6|||
|subject7|||
|subject8|||
|subject9||N|
|subject10|||
|subject11|||
|subject12|N|N|
|subject13||N|
|subject14|||
|subject15|N||
|subject16|||
|subject17|||
|subject18|||
|subject19|||
|subject20|N||
- 의미
- 동작의 구분
- 연골전도의 검출
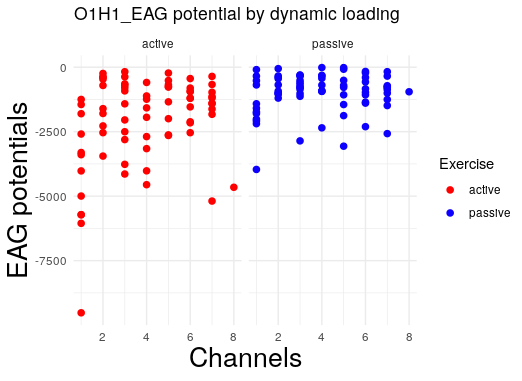
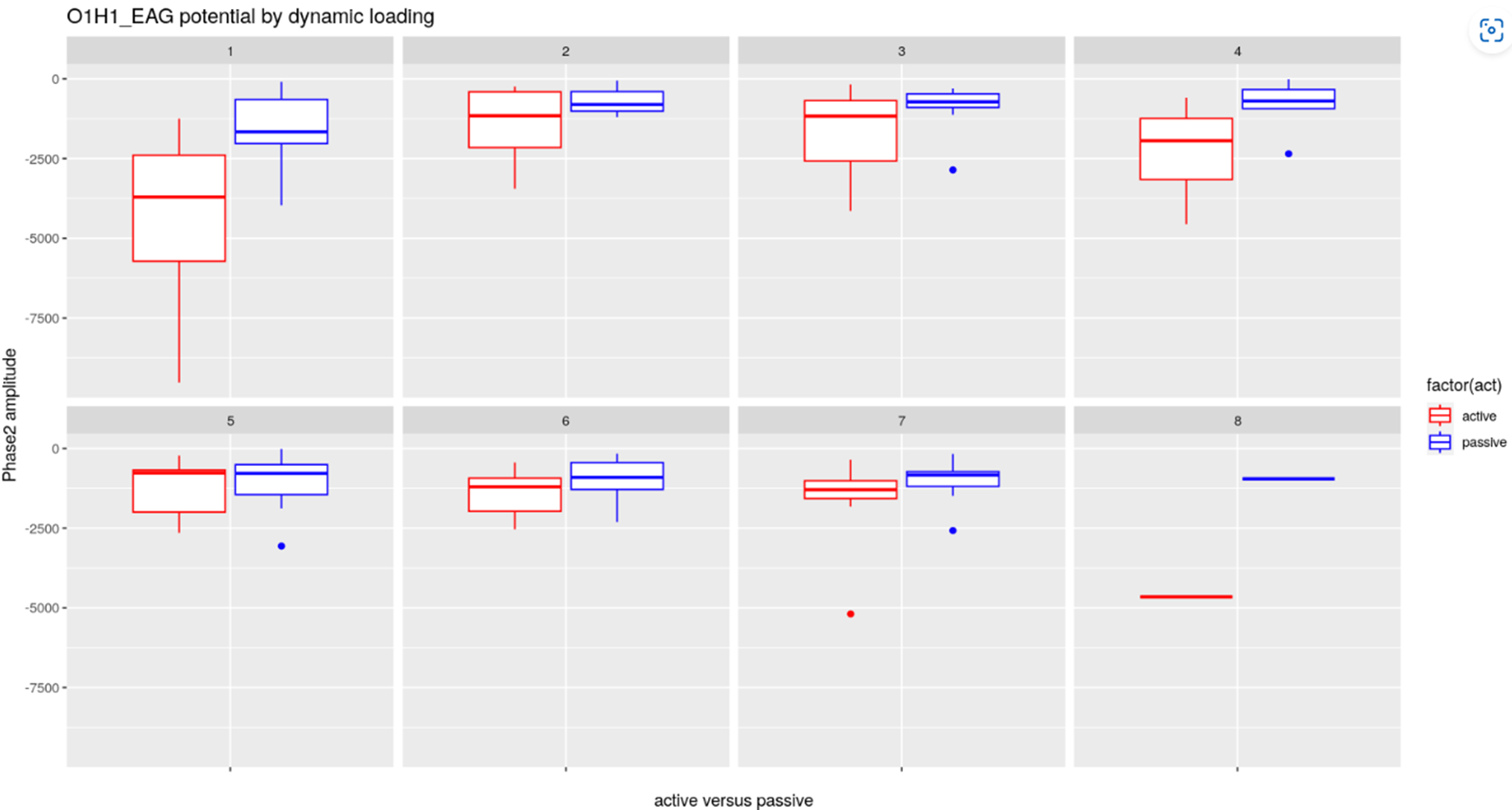
- 다이나믹 로딩이므로 pip-a 를 연골에 가해진 힘이라고 가정하고(참고문헌), 능동 수동간의 통계적 차이를 보여주는 채널을 다이나믹로딩을 검출하는데 유의한 채널위치로 하겠다.
- 1, 4번
- 채널별 신뢰도
- 대부분의 사람에서 비슷하게 부착된 위치가 비슷한 양상을 보이면.. 채널간 크기차이를 평균내거나.. CH1을 기준으로 보정해볼수 있겠다..(아니면 전체 크기를 보고 보정..?)
- 보정방법
- 채널간 크기차이 표준화
- 제일큰 채널기준 보정
- 능동과 수동에서 PIP_A 차이(SGP, O1H2)
- 
- 능동과 수동에서 PIP_D 일치도
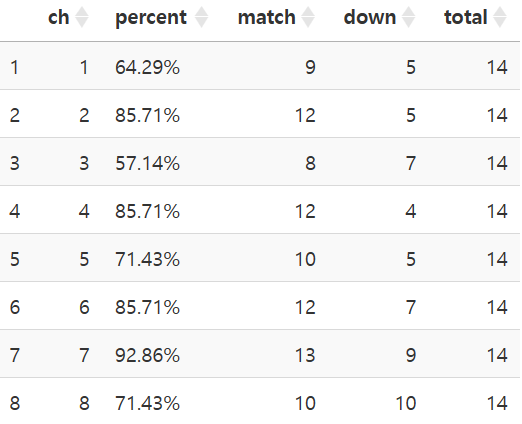
- 채널별 PIP_D 일치도

- 채널별 특징
- ch1
- EAG가 제일 크고 운동에 따른 변별력있음(ch4도).
- ch8
- PIP-D: stretch에서 전부 하강(pstretch에서는 대부분)
- PIP-A: pstretch에서 전부 상승drift (stretch도 종종)
- Subject별 특징
- sb14
- stretch에서 EAG값이 제일 큰 경향, pstretch는 작음(상승drift영향..)
- sb4
- pstretch에서 EAG값이 제일 큰 경향(ch7에서는 2번째)
- PIP-D의 모양 유사성..
- sb19
- str vs pst 모양 유사성 + squat 1번째 시도에서의 안정적인 그래프 모양. -> 가장 secured 된 subject로 생각됨.
- 비선형적 모양의 유사성은 parallel paper에서 군집분류 모델로 검증해보겠다
-
Comments